 少有人走的路
少有人走的路Tamura 纹理特征
我这篇文章主要是参考的Tamura纹理特征的matlab实现。本来没打算写这篇博客的,结果在写文章的时候各种找文献资料,都很难找到比较好的解释Tamura的文章。很多人的文章都是含糊其辞,要么就是排版稀烂,没法看。实在受不了自己写一个高大全的Tamura特征的博客,既方便自己也方便别人。
原始出处
原理解释
代码展示
原始出处
最原始的Tamura的论文《Textural Features Corresponding to Visual Perception》,IEEE上的这篇论文,可以直接下载。
Tamura纹理特征在一些中文论文中也有出现,也有解释的不错的,我推荐*《Tamura纹理特征在水下目标分类中的应用》*但是基本都避开了Tamura特征中线性相关的三个特征。
我在网上还找了一个讲纹理特征计算的博客,里面讲了Tamura纹理特征,还算是比较细致的,也不错。
原理解释
Tamura纹理特征包括六个指标:粗糙度(Coarseness)、对比度(Contrast)、方向度(Directionality)、线性度(Linelikeness)、规则度(Regularity)、粗略度(Roughness),一般论文里面只用前三个特征,说前面三个特征是线性无关的,后面三个特征和前面三个特征是线性相关的,因此只采用前三个特征。但是我发现其实线性度这个特征还是比较难解释的,单纯观察看到的代码而言。
$ 粗糙度(Coarseness)$
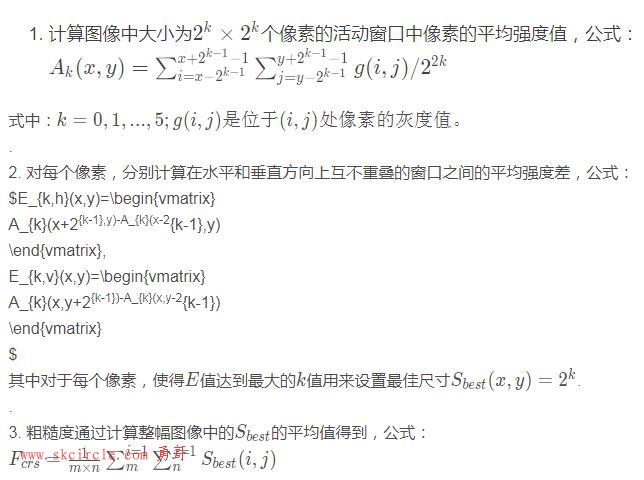
粗糙度是反映纹理中粒度的一个量,是最基本的纹理特征。当两种纹理特征模式知识基元尺寸不同时,具有较大基元尺寸的模式给人感觉更粗糙。粗糙度的计算可以分为以下几个步骤进行:
.
$ 对比度( Contrast)$
对比度是通过对像素强度分布情况的统计得到的,其大小由四个因素决定:灰度动态范围、直方图上黑白部分两极分化程度、边缘锐度和重复模式的周期。一般情况下,对比度指前面两个因素。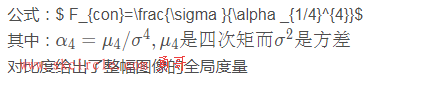
$ 方向度( Directionality)$
方向度是给定纹理区域的全局特性,描述纹理如何沿着某些方向发散或者集中的。计算步骤:
每个像素出的梯度向量
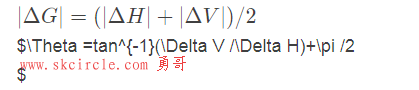
其中:$ \Delta V 和\Delta H$分别是通过图像卷积下面两个3×3卷积核得到的水平和垂直方向上的变化量。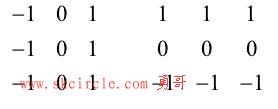
当所有的像素梯度向量都被计算出来后,可以使用直方图HD表达θ值。
2. 通过直方图对θ值域范围进行离散化
3. 统计每个柄中相应的∣ΔG∣大于给定阈值的像素数量。 对于有明显方向性的图像会出现峰值,对于无明显方向性的图像表现的比较平坦。
$ 线性度( Linelikeness)$
线性度几乎所有的中文文献上都没有提及,今天我这相当于独一份儿了。(接下来的内容都是我从原始论文上搬下来的,可能有些地方翻译的不到位,大家还望见谅)
似乎我们需要对线性度提出更多细节方面的描述。我们所指的线性度是由线段组成的纹理的一种情况。我们认为一个方向以及邻近的方向角度近似相等,我们认为这样的一组边缘点集是一条线段上的。
为了更加具体的描述,我们建立了方向共生矩阵,其中的元素PDd(i,j)是矩阵元素,它代表在图像中沿着边缘方向相距d的相邻两像素出现的频率,其中一个方向编码i,另一个的方向编码是j(本人认为这是代表不同的方向角度)。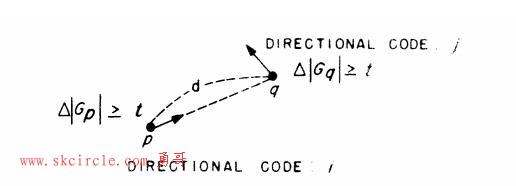

$ 规则度(Regularity)$

$ 粗略度(Roughness)$
代码展示
都是MATLAB写的函数代码
function feature=Tamura(imag)
feature=zeros(1,5);
Fcrs=coarseness(imag,4);
Fcon=contrast(imag);
[Fdir,sita]=directionality(imag);
Flin=linelikeness(imag,sita,4);
% Freg{k,1}=regularity(I{1,k},32);
Frgh=Fcrs+Fcon;
feature(1,:)=[ Fcrs, Fcon,Fdir,Flin,Frgh];
end
%% 第一个指标 Coarseness,粗糙度
function Fcrs = coarseness( graypic,kmax )%graphic为待处理的灰度图像,2^kmax为最大窗口
[h,w]=size(graypic); %获取图片大小
A=zeros(h,w,2^kmax); %平均灰度值矩阵A
%计算有效可计算范围内每个点的2^k邻域内的平均灰度值
for i=2^(kmax-1)+1:h-2^(kmax-1)
for j=2^(kmax-1)+1:w-2^(kmax-1)
for k=1:kmax
A(i,j,k)=mean2(graypic(i-2^(k-1):i+2^(k-1)-1,j-2^(k-1):j+2^(k-1)-1));
end
end
end
%对每个像素点计算在水平和垂直方向上不重叠窗口之间的Ak差
for i=1+2^(kmax-1):h-2^(kmax-1)
for j=1+2^(kmax-1):w-2^(kmax-1)
for k=1:kmax
Eh(i,j,k)=abs(A(i+2^(k-1),j,k)-A(i-2^(k-1),j));
Ev(i,j,k)=abs(A(i,j+2^(k-1),k)-A(i,j-2^(k-1)));
end
end
end
%对每个像素点计算使E达到最大值的k
for i=2^(kmax-1)+1:h-2^(kmax-1)
for j=2^(kmax-1)+1:w-2^(kmax-1)
[maxEh,p]=max(Eh(i,j,:));
[maxEv,q]=max(Ev(i,j,:));
if maxEh>maxEv
maxkk=p;
else
maxkk=q;
end
Sbest(i,j)=2^maxkk; %每个像素点的最优窗口大小为2^maxkk
end
end
%所有Sbest的均值作为整幅图片的粗糙度
Fcrs=mean2(Sbest);
end
%% 第二个指标 Contrast,对比度
%注意这个函数因为涉及到方差,要求输入类型为double,因此我这里在源代码上做了适当的修改
function Fcon=contrast(graypic) %graypic为待处理的灰度图片
graypic=double(graypic);%这一句我自己做了修改,否则原博文中的代码不能直接运行
x=graypic(:); %二维向量一维化
M4=mean((x-mean(x)).^4); %四阶矩
delta2=var(x,1); %方差
alfa4=M4/(delta2^2); %峰度
delta=std(x,1); %标准差
Fcon=delta/(alfa4^(1/4)); %对比度
end
%% 第三个指标 Directionality,方向度
%sita为各像素点的角度矩阵,在线性度中会用到,所以这里作为结果返回
function [Fdir,sita]=directionality(graypic)
[h w]=size(graypic);
%两个方向的卷积矩阵
GradientH=[-1 0 1;-1 0 1;-1 0 1];
GradientV=[ 1 1 1;0 0 0;-1 -1 -1];
%卷积,取有效结果矩阵
MHconv=conv2(graypic,GradientH);
MH=MHconv(3:h,3:w);
MVconv=conv2(graypic,GradientV);
MV=MVconv(3:h,3:w);
%向量模
MG=(abs(MH)+abs(MV))./2;
%有效矩阵大小
validH=h-2;
validW=w-2;
%各像素点的方向
for i=1:validH
for j=1:validW
sita(i,j)=atan(MV(i,j)/MH(i,j))+(pi/2);
end
end
n=16;
t=12;
Nsita=zeros(1,n);
%构造方向的统计直方图
for i=1:validH
for j=1:validW
for k=1:n
if sita(i,j)>=(2*(k-1)*pi/2/n) && sita(i,j)<((2*(k-1)+1)*pi/2/n) && MG(i,j)>=t
Nsita(k)=Nsita(k)+1;
end
end
end
end
for k=1:n
HD(k)=Nsita(k)/sum(Nsita(:));
end
%假设每幅图片只有一个方向峰值,为计算方便简化了原著
[maxvalue,FIp]=max(HD);
Fdir=0;
for k=1:n
Fdir=Fdir+(k-FIp)^2*HD(k);%公式与原著有改动
end
end
%% 第四个指标 Linelikeness,线性度
%image=rgb2gray(imread('example.jpg'));
%Flin=linelikeness(image,sita,4) %sita为directionality.m返回的结果
function Flin=linelikeness(graypic,sita,d) %d为共生矩阵计算时的像素间隔距离
n=16;
[h,w]=size(graypic);
%构造方向共生矩阵
PDd1=zeros(n,n);
PDd2=zeros(n,n);
PDd3=zeros(n,n);
PDd4=zeros(n,n);
PDd5=zeros(n,n);
PDd6=zeros(n,n);
PDd7=zeros(n,n);
PDd8=zeros(n,n);
for i=d+1:h-d-2
for j=d+1:w-d-2
for m1=1:n
for m2=1:n
%下方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i+d,j)>=(2*(m2-1)*pi/2/n) && sita(i+d,j)<((2*(m2-1)+1)*pi/2/n))
PDd1(m1,m2)=PDd1(m1,m2)+1;
end
%上方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i-d,j)>=(2*(m2-1)*pi/2/n) && sita(i-d,j)<((2*(m2-1)+1)*pi/2/n))
PDd2(m1,m2)=PDd2(m1,m2)+1;
end
%右方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i,j+d)>=(2*(m2-1)*pi/2/n) && sita(i,j+d)<((2*(m2-1)+1)*pi/2/n))
PDd3(m1,m2)=PDd3(m1,m2)+1;
end
%左方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i,j-d)>=(2*(m2-1)*pi/2/n) && sita(i,j-d)<((2*(m2-1)+1)*pi/2/n))
PDd4(m1,m2)=PDd4(m1,m2)+1;
end
%右下方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i+d,j+d)>=(2*(m2-1)*pi/2/n) && sita(i+d,j+d)<((2*(m2-1)+1)*pi/2/n))
PDd5(m1,m2)=PDd5(m1,m2)+1;
end
%右上方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i-d,j+d)>=(2*(m2-1)*pi/2/n) && sita(i-d,j+d)<((2*(m2-1)+1)*pi/2/n))
PDd6(m1,m2)=PDd6(m1,m2)+1;
end
%左下方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i+d,j-d)>=(2*(m2-1)*pi/2/n) && sita(i+d,j-d)<((2*(m2-1)+1)*pi/2/n))
PDd7(m1,m2)=PDd7(m1,m2)+1;
end
%左上方向
if (sita(i,j)>=(2*(m1-1)*pi/2/n) && sita(i,j)<((2*(m1-1)+1)*pi/2/n)) && (sita(i-d,j-d)>=(2*(m2-1)*pi/2/n) && sita(i-d,j-d)<((2*(m2-1)+1)*pi/2/n))
PDd8(m1,m2)=PDd8(m1,m2)+1;
end
end
end
end
end
f=zeros(1,8);
g=zeros(1,8);
for i=1:n
for j=1:n
f(1)=f(1)+PDd1(i,j)*cos((i-j)*2*pi/n);
g(1)=g(1)+PDd1(i,j);
f(2)=f(2)+PDd2(i,j)*cos((i-j)*2*pi/n);
g(2)=g(2)+PDd2(i,j);
f(3)=f(3)+PDd3(i,j)*cos((i-j)*2*pi/n);
g(3)=g(3)+PDd3(i,j);
f(4)=f(4)+PDd4(i,j)*cos((i-j)*2*pi/n);
g(4)=g(4)+PDd4(i,j);
f(5)=f(5)+PDd5(i,j)*cos((i-j)*2*pi/n);
g(5)=g(5)+PDd5(i,j);
f(6)=f(6)+PDd6(i,j)*cos((i-j)*2*pi/n);
g(6)=g(6)+PDd6(i,j);
f(7)=f(7)+PDd7(i,j)*cos((i-j)*2*pi/n);
g(7)=g(7)+PDd7(i,j);
f(8)=f(8)+PDd8(i,j)*cos((i-j)*2*pi/n);
g(8)=g(4)+PDd8(i,j);
end
end
tempM=f./g;
Flin=max(tempM);%取8个方向的线性度最大值作为图片的线性度
end
%% 第五个指标 Regularity,规则度
%image=rgb2gray(imread('example.jpg'));
%Freg=regularity(image,64)
function Freg=regularity(graypic,windowsize) %windowsize为计算规则度的子窗口大小
[h,w]=size(graypic);
k=0;
for i=1:windowsize:h-windowsize
for j=1:windowsize:w-windowsize
k=k+1;
crs(k)=coarseness(graypic(i:i+windowsize-1,j:j+windowsize-1),4); %粗糙度
con(k)=contrast(graypic(i:i+windowsize-1,j:j+windowsize-1)); %对比度
[dire(k),sita]=directionality(graypic(i:i+windowsize-1,j:j+windowsize-1));%方向度
lin=linelikeness(graypic(i:i+windowsize-1,j:j+windowsize-1),sita,4)*10; %线性度,*10与crs、con、dire同量级化
end
end
Dcrs=std(crs,1);
Dcon=std(con,1);
Ddir=std(dire,1);
Dlin=std(lin,1);
Freg=1-(Dcrs+Dcon+Ddir+Dlin)/4/100;
end转载自:
https://blog.csdn.net/u011268787/article/details/79013871




")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





