 少有人走的路
少有人走的路勇哥的同事反映,设备的机器人在低速运动的时候,取放重复性精度可以做到+-0.2mm。
但是在高速运行的时候,精度只能做到+-0.8mm。
这又是什么鬼呢?
我问了一圈公司的高手,他们的意见是:
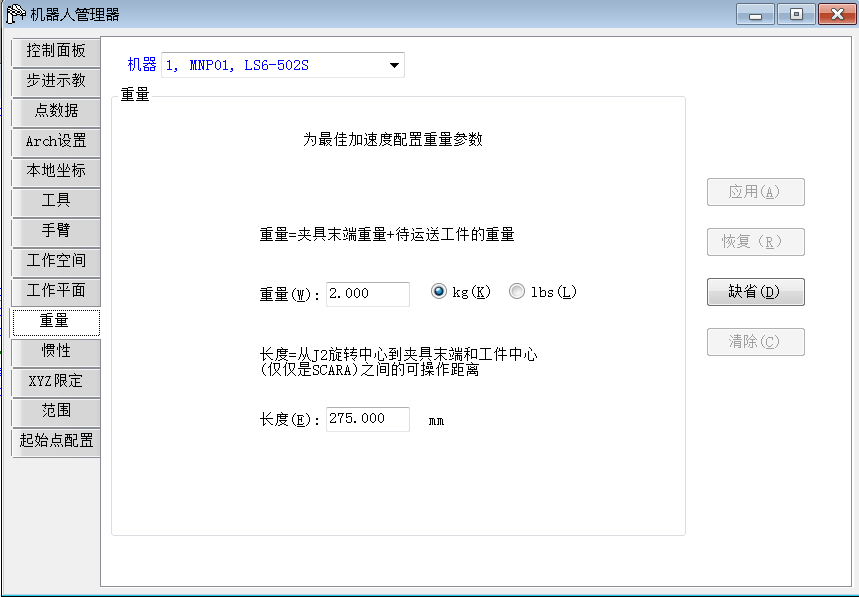
(1)机器人的惯性与重量要设置
(2)机器人的acc加速度参数要设置,让起停速度更圓滑些
(3)观察机器本身的晃动、相机的晃动、机器爪的晃动,看是否有影响
(4)机器人取放之前的暂停时间是有必要的
精度要求不高的时候,机器人的默认参数不可以了。
精度要求高的时候,默认值就不在适应了。
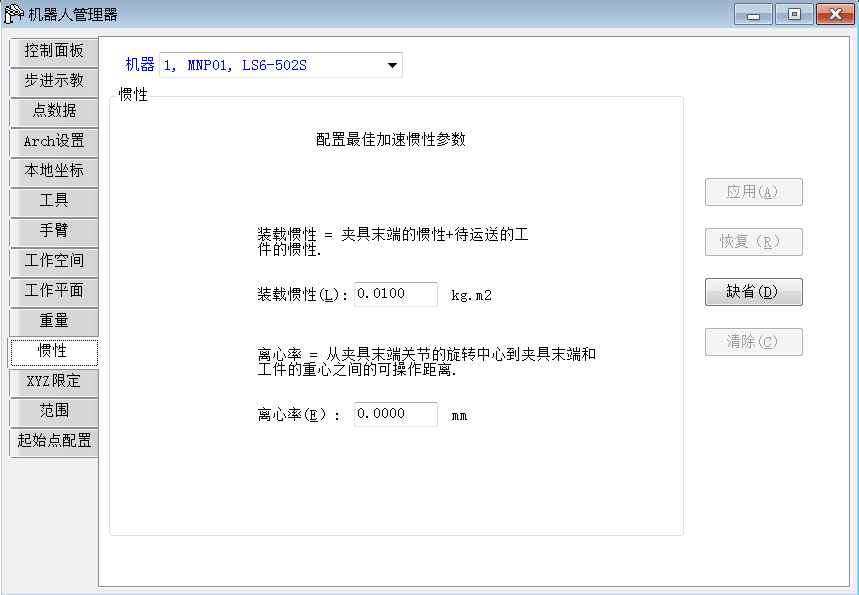
装载惯性(力矩)是表示物体旋转阻力的量,由惯性力矩、惯性、GD2等的值表示。在轴上安装夹具末端等并进行动作时,必须要考虑负载的装载惯性(力矩)。
注意
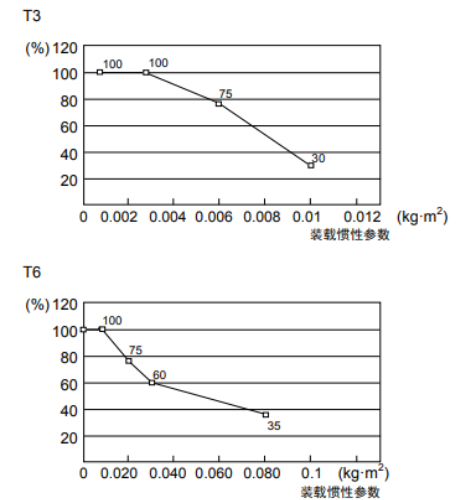
■ 负载(夹具末端重量+工件重量)的装载惯性必须为T3: 0.01 kg·m2 / T6: 0.08 kg·m2以下。T系列爱普生机器人设计的工作装载惯性不超过T3: 0.01 kg·m2 / T6: 0.08 kg·m2。另外,请务必设定适合的装载惯性值。如果在装载惯性参数中设定小于实际装载惯性的值,则可能会导致发生错误或冲击,这不仅不能充分发挥性能,而且还可能缩短各机构部件的使用寿命或因皮带齿轮跳动发生位置间隙的可能性。

T系列爱普生机器人可接受的装载惯性:
T3:额定0.003 kg·m2,*大0.01 kg·m2
T6:额定0.01 kg·m2,*大0.08 kg·m2
负载的装载惯性(力矩)超过额定值时,变更Inertia命令的负载装载惯性Inertia参数设定。
如果进行设定变更,则基于“装载惯性”自动补偿第4关节PTP动作时的*大加减速度。
轴上安装负载的装载惯性(力矩)
利用Inertia命令的“装载惯性”参数来设定轴上安装负载物(夹具末端重量+工件重量)的装载惯性(力矩)。
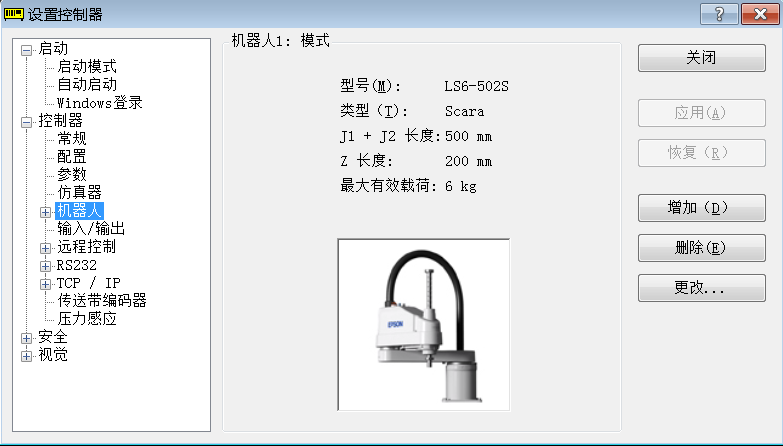
注,如何查看自己机器人的型号和最大重量?
看下图:
勇哥来总结一下:
(1)关于重量:这个参数设置的时候一定要大于机器人负荷的最大重,小于这款机器人标称的最大有效负载荷。
挂在机器人U轴上面的一加工件就是机器人的负荷。
重量设置越大,机器人运动时越稳,负作用是机器人运行速度会变慢。
如果重设置小于机器人负荷,则长时间运行后,机器人会跳齿,造成走不准。
(2)离心率:这个参数是处理那种挂在U轴的负荷加工件左短右长(不平衡)的情况的。
这种情况下,如果不设置离心率,机器人高速运动时负载就会抖动。
离心率也会影响机器人的运行速度。
(3)惯性:当你的机器人运行越来有嗡嗡响的时候,需要设置适当的惯性参数,让动作更加平衡。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")

:功能介绍")




Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





