 少有人走的路
少有人走的路数学模型
已知两个坐标系在各方向上尺度缩放比例一致,两个坐标系的转换关系可以用7个参数来表示,3个旋转参数,3个平移参数,1个比例参数。已知三点在A、B两个坐标系中的坐标,那么这7个参数可以唯一确定。
坐标转换的数学模型为:
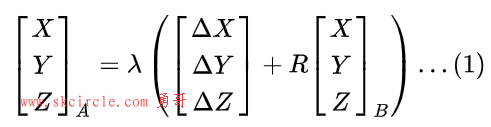
其中,λ是比例参数,R是旋转矩阵,Δ是平移向量,A、B分别是两个坐标系中的坐标。
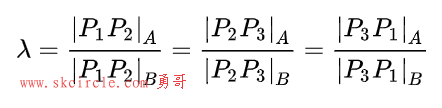
比例参数λ最容易计算
![]()
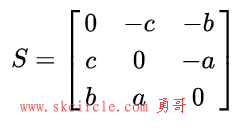
旋转矩阵R是一个3x3的正交矩阵,有3个自由度。可利用反对称矩阵S来构造旋转矩阵R:
那么
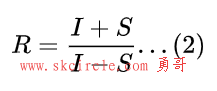
其中I是单位矩阵,这里R只有a、b、c三个变量,解出a、b、c即可确定旋转矩阵R。
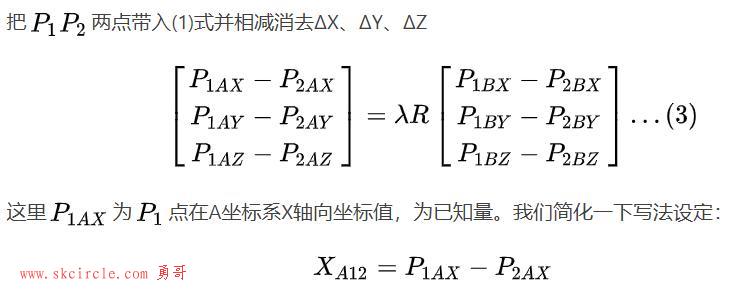
这样(3)式可写为
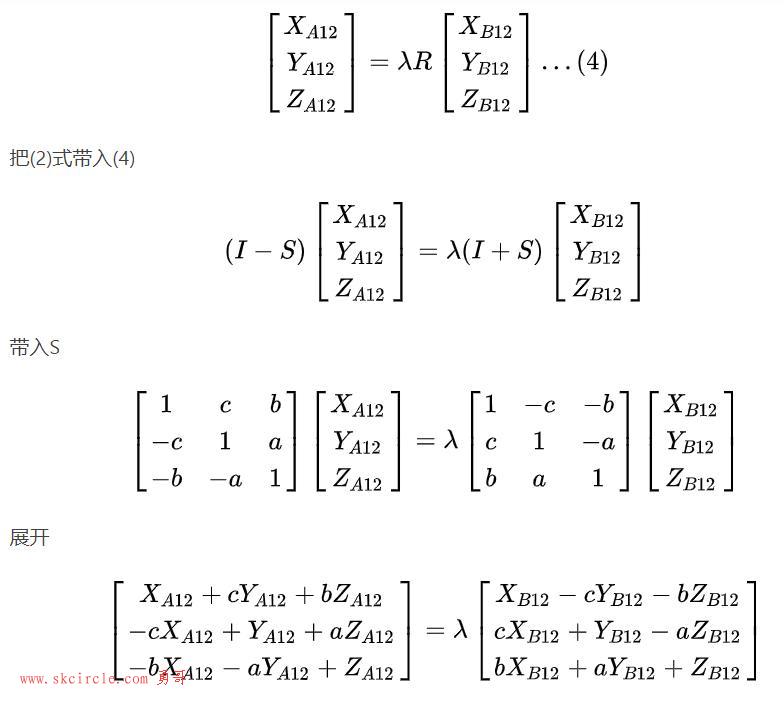
整理可得
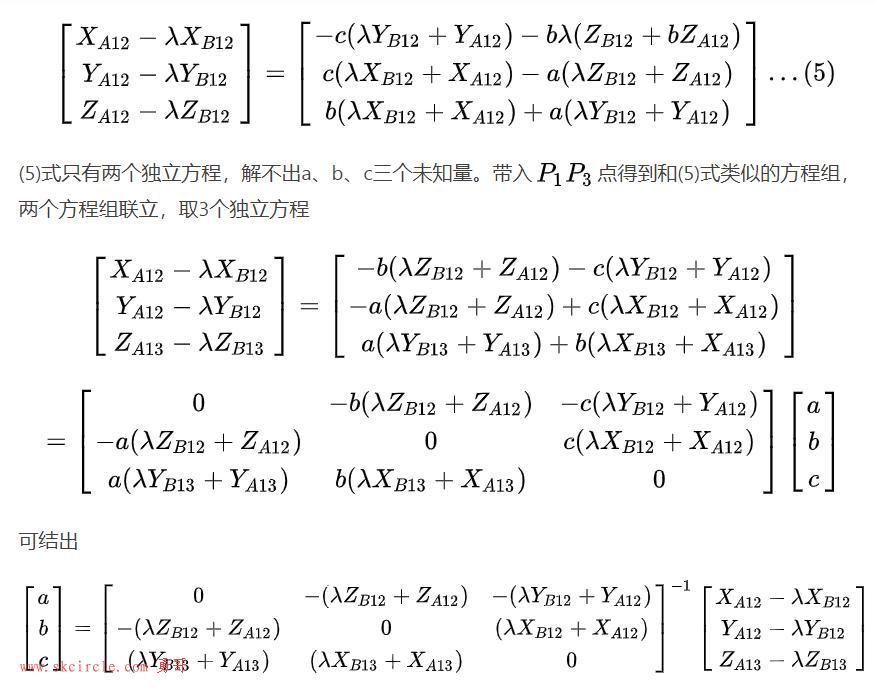
把a、b、c带入(2)式可到旋转矩阵R,把任意一点坐标带入(1)式可得Δ。
swift算法实现
在ARKit中,SCNNode.transform是一个4x4的变换矩阵,
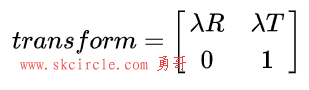
下面代码中的m_Translation为λT,m_Rotation为λR
声明变量
var point1onA: float3 = float3(0,0,0) var point2onA: float3 = float3(0,0,0) var point3onA: float3 = float3(0,0,0) var point1onB: float3 = float3(0,0,0) var point2onB: float3 = float3(0,0,0) var point3onB: float3 = float3(0,0,0) var m_ratio: Float = 0.0 // 比例参数λ var m_Translation: float3 = float3(0,0,0) // λx平移向量Δ,3个参数 var m_Rotation: matrix_float3x3! // λx旋转矩阵R ,3个参数abc,计算时解算的是abc
计算比例参数λ,为了减少误差取平均值
func caliratio(){
var ratiotemp:[Float] = [0.0,0.0,0.0]
var temp1:Float = 0.0
var temp2:Float = 0.0
temp1 = distance(point1onA, point2onA)
temp2 = distance(point1onB, point2onB)
ratiotemp[0] = temp1/temp2
temp1 = distance(point2onA, point3onA)
temp2 = distance(point2onB, point3onB)
ratiotemp[1] = temp1/temp2
temp1 = distance(point1onA, point3onA)
temp2 = distance(point1onB, point3onB)
ratiotemp[2] = temp1/temp2
m_ratio = (ratiotemp[0]+ratiotemp[1]+ratiotemp[2])/3
}计算旋转矩阵R
func caliRotation(){
//2点减1点
let m12 = (point2onA.z - point1onA.z) + m_ratio*(point2onB.z - point1onB.z)
let m32 = (point2onA.x - point1onA.x) + m_ratio*(point2onB.x - point1onB.x)
let m31 = (point2onA.y - point1onA.y) + m_ratio*(point2onB.y - point1onB.y)
let m21 = m12
//3点减1点
let m23 = (point3onA.x - point1onA.x) + m_ratio*(point3onB.x - point1onB.x)
let m13 = (point3onA.y - point1onA.y) + m_ratio*(point3onB.y - point1onB.y)
let J = matrix_float3x3(float3(0,-m12,m13),float3(-m21,0,m23),float3(-m31,m32,0))
let K = J.inverse
var xyz = float3(0,0,0)
xyz.x = -1 * m_ratio*(point2onA.x - point1onA.x) + (point2onB.x - point1onB.x)
xyz.y = -1 * m_ratio*(point2onA.y - point1onA.y) + (point2onB.y - point1onB.y)
xyz.z = -1 * m_ratio*(point3onA.z - point1onA.z) + (point3onB.z - point1onB.z)
let abc = K * xyz
let S = matrix_float3x3(float3(0, abc.z, abc.y), float3(-1*abc.z, 0, abc.x), float3(-1*abc.y, -1*abc.x, 0))
let I = matrix_float3x3(float3(1,0,0), float3(0,1,0), float3(0,0,1))
m_Rotation = (I + S) * ((I - S).inverse) * m_ratio }计算偏移量
func caliTranslation(){
m_Translation = point3onA - m_Rotation * point3onB }测试
func test(){
point1onA = float3(1,0,0)
point2onA = float3(0,1,0)
point3onA = float3(0,0,1)
let node = SCNNode()
node.position = SCNVector3(0.1, 0.2, 0.3)
node.eulerAngles = SCNVector3(0.1, 0.2, 0.3)
node.scale = SCNVector3(1.2, 1.2, 1.2)
let newA = node.convertPosition(SCNVector3(point1onA), from: nil)
let newB = node.convertPosition(SCNVector3(point2onA), from: nil)
let newC = node.convertPosition(SCNVector3(point3onA), from: nil)
point1onB = float3(newA.x, newA.y, newA.z)
point2onB = float3(newB.x, newB.y, newB.z)
point3onB = float3(newC.x, newC.y, newC.z)
caliratio()
caliRotation()
caliTranslation()
print("比例参数λ:\(m_ratio)")
print("平移向量Δ:\(m_Translation)")
print("旋转矩阵R:\(m_Rotation)")
print("变换矩阵真值:node.transform")
}链接:https://www.jianshu.com/p/58cf5655f9a9
来源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")





Lungchain支持的Tools")
基本使用:Chains(链)")
创建一个聊天智能体")







