 少有人走的路
少有人走的路引言:
C#
勇哥注:所谓的3d相机标定并不是指的3d相机的标定,而是指的是3d空间做相机的标定,这个相机仍然是2D相机。 halcon的这套标定方法,同时可以应对测量、手眼标定。 并且由于是在3d空间做标定,因此你在做测量的时候相机和拍摄平面可以不是完全垂直, 或者物料可以任意方向倾斜(当然你的相机的景深要能做得到)。 如果你是做机器人手眼标定,这套标定方法无论是hand to eye,还是eye in hand,都可以搞定。 另外,你是四轴scara机器人还是串联的6轴机器人都可以的。 对于轴动的标定,也是没有问题的。 halcon的标定方法还可以实现相机标定和确定工作平面位姿进行分离。 这意味着你标定完相机后,你的测量平面可以随时改换。 halcon的这套3d相机标定方法不是一般的强,可以搞定现在工业机器视觉的绝大部分标定方面的应用。 至少勇哥还没发现有啥子应用它还做不到的。
任意测量平面进行测量
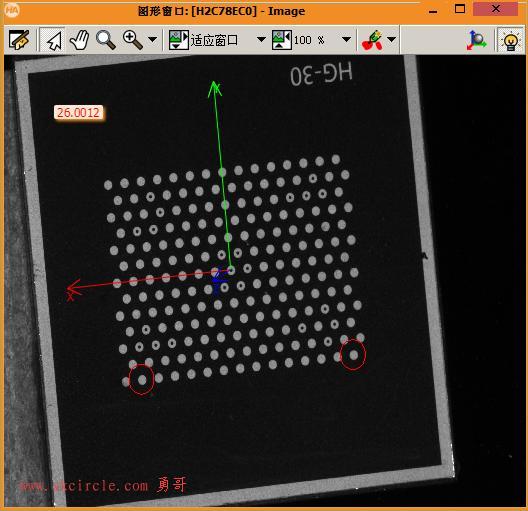
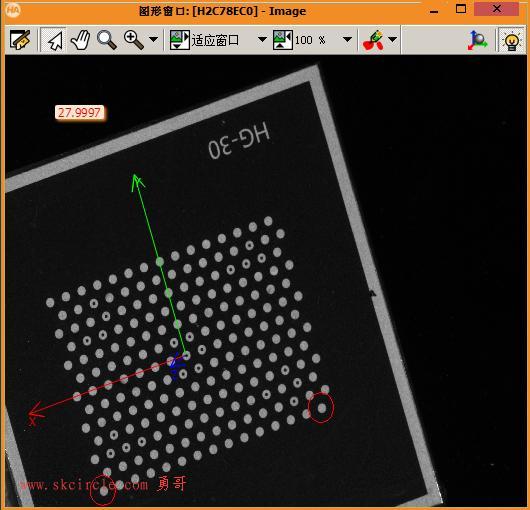
这个实验是把标定板置于任意方向及倾斜角度下(当然是在相机的景深范围内),测量两点距离。
演示代码:
*如果没标定先进行标定
*calib()
*磁盘载入标定结果
read_calib_data('D:/交流群的问题/skcircle1589_3d相机标定(三)/calib.ccd', CalibDataID)
*进行标定
calibrate_cameras(CalibDataID, Error)
*取得相机内参
get_calib_data (CalibDataID, 'camera', 0, 'params', CameraParameters)
stop ()
* open_framegrabber ('GigEVision2', 0, 0, 0, 0, 0, 0, 'progressive', \
-1, 'default', -1, 'false', 'default', '94aab8029638_Microvision_MVEM500M', 0, -1, AcqHandle)
* Image Acquisition 01: Code generated by Image Acquisition 01
list_files ('D:/交流群的问题/skcircle1589_3d相机标定(三)/', ['files','follow_links'], ImageFiles)
tuple_regexp_select (ImageFiles, ['\\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles)
for i:=0 to |ImageFiles| - 1 by 1
read_image (Image, ImageFiles[i])
*grab_image(Image, AcqHandle)
dev_get_window(WindowHandle)
*write_image(Image, 'tiff', 0, 'D:/交流群的问题/skcircle1589_3d相机标定(三)/img4.tif')
TmpCtrl_PlateDescription := 'E:/Program Files/MVTec/HALCON-19.11-Progress/calib/calplateHG30.cpd'
TmpCtrl_FindCalObjParNames := 'sigma'
TmpCtrl_FindCalObjParValues := 1
*取当前标定板的位姿
create_calib_data ('calibration_object', 1, 1, CalibHandle)
set_calib_data_cam_param (CalibHandle, 0, [], CameraParameters)
set_calib_data_calib_object (CalibHandle, 0, TmpCtrl_PlateDescription)
find_calib_object (Image, CalibHandle, 0, 0, 0, TmpCtrl_FindCalObjParNames, TmpCtrl_FindCalObjParValues)
get_calib_data_observ_points (CalibHandle, 0, 0, 0, TmpCtrl_MarkRows, TmpCtrl_MarkColumns, TmpCtrl_Ind, CameraPose)
*设置原点位置
set_origin_pose (CameraPose, 0.0, 0.0,0, CameraPose)
startInx:=0
endInx:=13
dev_display(Image)
dev_set_draw('margin')
disp_circle(WindowHandle, TmpCtrl_MarkRows[startInx], TmpCtrl_MarkColumns[startInx], 64)
disp_circle(WindowHandle, TmpCtrl_MarkRows[endInx], TmpCtrl_MarkColumns[endInx], 64)
*可以看到这个是像素的距离
distance_pp(TmpCtrl_MarkRows[startInx], TmpCtrl_MarkColumns[startInx],\
TmpCtrl_MarkRows[endInx], TmpCtrl_MarkColumns[endInx], Distance)
*像素点映射为世界坐标上的点
image_points_to_world_plane(CameraParameters, CameraPose, \
TmpCtrl_MarkRows[startInx], TmpCtrl_MarkColumns[startInx], 'mm', X1, Y1)
image_points_to_world_plane(CameraParameters, CameraPose, \
TmpCtrl_MarkRows[endInx], TmpCtrl_MarkColumns[endInx], 'mm', X2, Y2)
distance_pp(X1, Y1, X2, Y2, Distance2)
dev_disp_text(''+Distance2, 'window', 50, 50, 'red', [], [])
*显示3D坐标轴
disp_3d_coord_system(WindowHandle, CameraParameters, CameraPose, 0.02)
stop ()
endfor
*close_framegrabber (AcqHandle)read_calib_data 磁盘读入标定数据后要进行calibrate_cameras标定一次,这个别忘记了。
“取当前标定板的位姿”这一步过后,我们将以标定板的平面做为测量平面。
注意在测量的时候,只有标定板圆点范围内是能保证计算准确的,这也是为什么蜂窝标定板最好大小超出视野范围。
设定原点位置,这个Z传入是0,即相当于标定板为0厚度,因为我们取标定板表面做为测量平面,因此需要如此。
或者把下面这句注释掉也是可以的。
set_origin_pose (CameraPose, 0.0, 0.0,0, CameraPose)
image_points_to_world_plane 将图像点转换为世界坐标系的平面z = 0(即测量平面),可以白话为像素转世界坐标。
详细可参看:http://www.skcircle.com/?id=1580
勇哥这块标定板圆点间距是2mm。
而且请注意勇哥这块标定板在不同的姿式下倾斜角度是随手摆的,并不是平放的。
由结果看来,精度是相当的高。
详细还可以参看勇哥录制的视频教程。
其它参考:
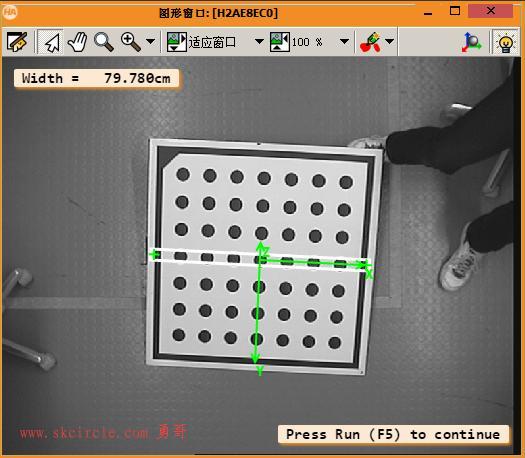
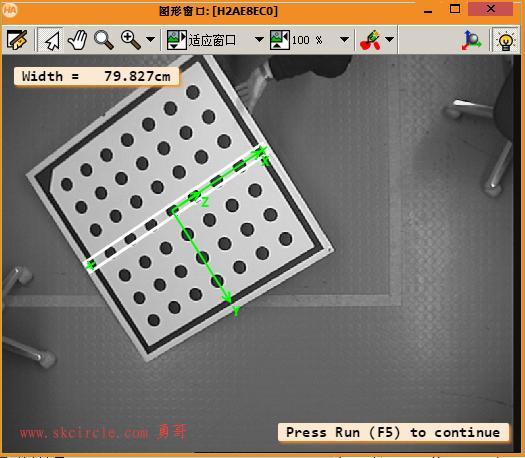
halcon例程: 3d_coordinates.hdev
这个例子想表现的知识点和勇哥上面讲的是一致。
只是,有个比较有意思的地方是,这个例子中标定板已经倾斜到45度了(这也是halcon推荐的),怎么这个相机能有这么大的景深?
程序:
*
* Initialize the program
dev_close_window ()
dev_open_window (0, 0, 768, 576, 'black', WindowHandle)
dev_update_off ()
dev_set_draw ('margin')
dev_set_line_width (3)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
*
* Calibrate the camera
*
CalTabDescrFile := 'caltab_big.descr'
gen_cam_par_area_scan_division (0.008, 0, 0.0000086, 0.0000086, 384, 288, 768, 576, StartCamPar)
create_calib_data ('calibration_object', 1, 1, CalibDataID)
set_calib_data_cam_param (CalibDataID, 0, [], StartCamPar)
set_calib_data_calib_object (CalibDataID, 0, CalTabDescrFile)
NumImages := 10
for I := 1 to NumImages by 1
read_image (Image, 'calib/calib-3d-coord-' + I$'02d')
dev_display (Image)
Message := 'Find calibration plate in\nall calibration images (' + I + '/' + NumImages + ')'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
* Find the calibration plate
find_calib_object (Image, CalibDataID, 0, 0, I - 1, [], [])
get_calib_data (CalibDataID, 'camera', 0, 'init_params', StartCamPar)
get_calib_data_observ_points (CalibDataID, 0, 0, I - 1, Row, Column, Index, Pose)
get_calib_data_observ_contours (Contours, CalibDataID, 'caltab', 0, 0, I - 1)
gen_cross_contour_xld (Cross, Row, Column, 6, 0.785398)
dev_set_color ('green')
dev_display (Contours)
dev_set_color ('yellow')
dev_display (Cross)
endfor
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
calibrate_cameras (CalibDataID, Error)
get_calib_data (CalibDataID, 'camera', 0, 'params', CamParam)
*
* Perform measurements
*
for I := 1 to NumImages by 1
read_image (Image, 'calib/calib-3d-coord-' + I$'02d')
*
* Now, measure the size of the black border of the plate
get_measure_positions (Image, PlateRegion, CalibDataID, I, Distance, Phi, RowCenter, ColumnCenter)
gen_rectangle2_contour_xld (Rectangle, RowCenter, ColumnCenter, Phi, Distance * 0.52, 8)
gen_measure_rectangle2 (RowCenter, ColumnCenter, Phi, Distance * 0.52, 8, 768, 576, 'nearest_neighbor', MeasureHandle)
*
measure_pos (Image, MeasureHandle, 1, 40, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance1)
Rows := [RowEdge[0],RowEdge[|RowEdge| - 1]]
Columns := [ColumnEdge[0],ColumnEdge[|RowEdge| - 1]]
gen_cross_contour_xld (Cross, Rows, Columns, 16, Phi)
*
* Transform the two border points into the world coordinate system
get_calib_data (CalibDataID, 'calib_obj_pose', [0,I - 1], 'pose', Pose)
image_points_to_world_plane (CamParam, Pose, Rows, Columns, 'm', SX, SY)
distance_pp (SY[0], SX[0], SY[1], SX[1], Width)
*
* Display results of width measurement
dev_display (Image)
dev_set_color ('white')
dev_set_line_width (3)
dev_display (Rectangle)
dev_set_color ('green')
dev_set_draw ('fill')
dev_set_line_width (2)
dev_display (Cross)
dev_set_draw ('margin')
disp_message (WindowHandle, 'Width = ' + (Width * 100)$'8.3f' + 'cm', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* Now, measure the size of the calibration marks
*
* Extract the ellipses in the image
erosion_circle (PlateRegion, ROI, 17.5)
reduce_domain (Image, ROI, ImageReduced)
edges_sub_pix (ImageReduced, Edges, 'canny', 1, 20, 60)
select_contours_xld (Edges, SelectedEdges, 'contour_length', 20, 99999999, -0.5, 0.5)
* Fit ellipses to extracted edges
fit_ellipse_contour_xld (SelectedEdges, 'fitzgibbon', -1, 2, 0, 200, 3, 2, Row, Column, Phi, Radius1, Radius2, StartPhi, EndPhi, PointOrder)
MeanRadius1 := mean(Radius1)
MeanRadius2 := mean(Radius2)
DevRadius1 := deviation(Radius1)
DevRadius2 := deviation(Radius2)
* Transform the ellipses to world coordinates, where they should be circles
* and convert the circles from meters to millimeters so that we can see them.
contour_to_world_plane_xld (SelectedEdges, WorldCircles, CamParam, Pose, 'mm')
* Fit ellipses to the circles in world coordinates
fit_ellipse_contour_xld (WorldCircles, 'fitzgibbon', -1, 2, 0, 200, 3, 2, Row, Column, Phi, RadiusW1, RadiusW2, StartPhi, EndPhi, PointOrder)
MeanRadiusW1 := mean(RadiusW1)
MeanRadiusW2 := mean(RadiusW2)
DevRadiusW1 := deviation(RadiusW1)
DevRadiusW2 := deviation(RadiusW2)
*
* Display results of ellipse measurement
dev_display (Image)
dev_set_color ('yellow')
dev_set_line_width (3)
dev_display (SelectedEdges)
Message := 'Measured dimensions of the ellipses'
Message[0] := ' Mean Radius1; Mean Radius2; (Standard deviations [%])'
Message[1] := 'Image coordinates: ' + MeanRadius1$'5.2f' + 'px; ' + MeanRadius2$'5.2f' + 'px (' + (DevRadius1 / MeanRadius1 * 100)$'4.2f' + ', ' + (DevRadius2 / MeanRadius2 * 100)$'4.2f' + ')'
Message[2] := 'World coordinates: ' + (MeanRadiusW1 / 10)$'5.2f' + 'cm; ' + (MeanRadiusW2 / 10)$'5.2f' + 'cm (' + (DevRadiusW1 / MeanRadiusW1 * 100)$'4.2f' + ', ' + (DevRadiusW2 / MeanRadiusW2 * 100)$'4.2f' + ')'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
if (I < 10)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endforget_measure_positions自定义函数的参数。
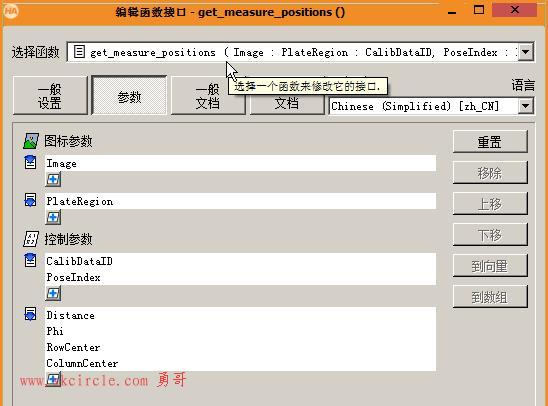
get_measure_positions的代码
* Extract the calibration plate threshold (Image, Region, 0, 120) connection (Region, ConnectedRegions) select_shape (ConnectedRegions, SelectedRegions, ['holes_num','rect2_len1','rect2_len2'], 'and', [1,120,120], [1,200,200]) fill_up (SelectedRegions, PlateRegion) * Construct the measurement rectangle from the border of the table. gen_contour_region_xld (PlateRegion, Contours, 'center') segment_contours_xld (Contours, ContoursSplit, 'lines', 7, 4, 2) regress_contours_xld (ContoursSplit, RegressContours, 'no', 1) select_contours_xld (RegressContours, VerticalContours, 'direction', rad(45), rad(135), -0.5, 0.5) select_contours_xld (VerticalContours, LongContours, 'length', 150, 500, -0.5, 0.5) * The measurement line is constructed from the center points of the * two vertical border lines of the table. select_obj (LongContours, Contour, 1) get_contour_xld (Contour, Rows, Columns) RowBegin1 := Rows[0] ColBegin1 := Columns[0] RowEnd1 := Rows[|Rows| - 1] ColEnd1 := Columns[|Columns| - 1] select_obj (LongContours, Contour, 2) get_contour_xld (Contour, Rows, Columns) RowBegin2 := Rows[0] ColBegin2 := Columns[0] RowEnd2 := Rows[|Rows| - 1] ColEnd2 := Columns[|Columns| - 1] * Now do the actual measurement in the image get_calib_data_observ_points (CalibDataID, 0, 0, PoseIndex - 1, Row, Column, PoseIndex, _Pose) Row1 := Row[find(PoseIndex,21)] Row2 := Row[find(PoseIndex,27)] Column1 := Column[find(PoseIndex,21)] Column2 := Column[find(PoseIndex,27)] intersection_lines (Row1, Column1, Row2, Column2, RowBegin1, ColBegin1, RowEnd1, ColEnd1, RowA, ColA, IsOverlapping) intersection_lines (Row1, Column1, Row2, Column2, RowBegin2, ColBegin2, RowEnd2, ColEnd2, RowB, ColB, IsOverlapping) distance_pp (RowA, ColA, RowB, ColB, Distance) line_orientation (RowA, ColA, RowB, ColB, Phi) RowCenter := (RowA + RowB) / 2 ColumnCenter := (ColA + ColB) / 2 return ()
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")
:与C#不同点,鸭子类型,多线程,多进程编程,访问控制,事件委托实现,lambda表达式,常用内置库,为啥说python简单易用?")
:基础知识")


:QWidget,QMainWindow")
Lungchain支持的Tools")
基本使用:Chains(链)")
创建一个聊天智能体")







