 少有人走的路
少有人走的路(一)编码器
编码器分为绝对值型和增量型
增量型编辑器在运动控制中可以在当前位置计数置0,绝对值编码器不可以。
1. 编码器输入方式
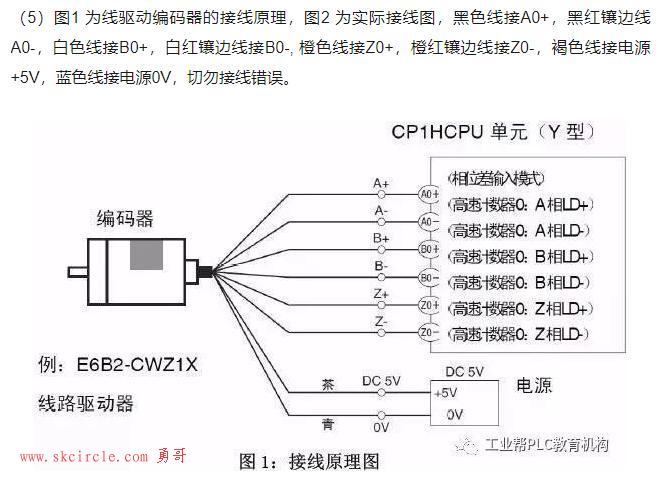
编码器的InMode 即编码器输入方式,1:脉冲+方向信号;2:A、B 相位正交信号
这两种方式是根据编码器接线不同而不同。
其中AB相位正交信号最为常用。这种方式用于提高分辨率,利用相位差为90度的 A、B信号与原脉冲数相乘
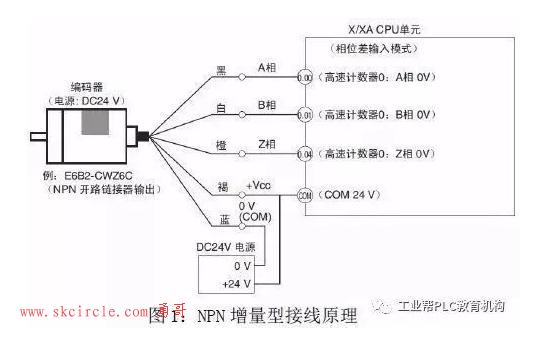
(图1) NPN增量型编码器接线
(图2) PNP绝对值编码器接线图
2. 辅助编码器
当轴的伺服电机自带的编码器精度不够时,使用辅助编码器提高精度。
在有些运动卡上面可以指定辅助编码器通道,0,通道 0,1,通道 1
3. 位置误差带
编码器在误差带范围内波动?
4.
(二) 回原相关
1. 回原模式
总线型运动板卡由驱动器控制回原动作。而普通PCI运动版卡则由板卡指令进行回原。
在轴回原时,轴所处的位置多样,造成回原时可能会有许多种情况要考虑。
如下图所示,如果轴通电时不位于2所在位置,那么可能需要拍急停,手动拔动电机到2号位置,再执行回原。
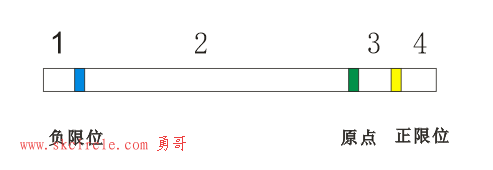
因此,类似于总线型运动控制器,它内置了几十种回原方式,就是为了处理种种特殊的回原需求。
2. 限位
常见的有6类限位: 正限位,负限位,软正限位,软负限位,原点,Z
3.
(三) 插补运动
(四)锁存
锁存的应用:
相对应的传感器被触发后,可将目前马达所在的理论或实际位置记录下来,以提供使用者应用于在相关应用上。
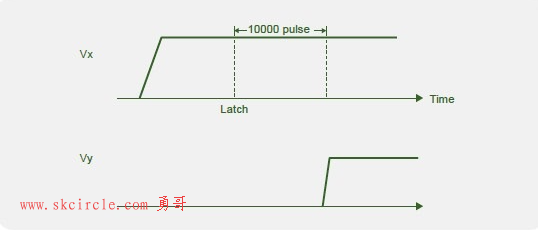
顾名思义,就是将某一时刻的轴位置存放起来。比方说加工机床如果需要找工件边缘,需要按较低的速度,一定的轨迹运动,当到达工件边缘时轴的锁存输入点检测到工件,此时的坐标就被保存起来,就算是之后过冲,保存的坐标也不会改变,除非锁存输入点状态改变。
一般每个轴都有一个用于锁存的输入点。有时将几个输入点并联起来只接一个传感器。
板卡锁存一般提供下面几个参数:
1. 锁存号
一般只有几个
2. 锁存模式
单次,或者连续锁存
3. 锁存信号触发模式
上升沿锁存,下降沿锁存等
4. 锁存的数据
在实际应用上,锁存可以配合用于飞拍触发拍照。
(五) 位置比较输出
位置比较用于当轴运动到指定位置时输出IO点位。
运动板卡会先将点位写到FPG的寄存器中去,然后高速监控扫描,如果轴到达位置则几ns内进行IO输出
(六)螺距补尝
由于丝杆不能保证在其长度范围内跟轴完全平行,丝杆只保证其在一定范围内能保证标称精度,超出范围则精度有变化。即使是贴上光栅尺进行轴的精度修正,但是因为贴上光栅尺后也有起伏现象,造成有轴的数据有精度误差。
因此需要做螺距补偿,消除这种误差。




")
")
常用的6种方法")
 封装运动功能")




基本使用:Chains(链)")








