 少有人走的路
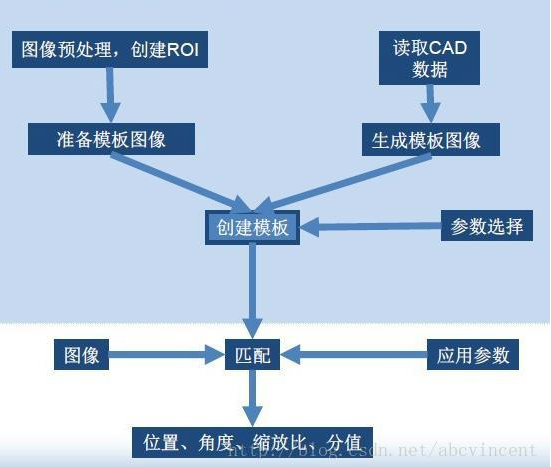
少有人走的路halcon的模板匹配种类有很多种,方法各有优缺点,一般有基于灰度的匹配,基于形状的匹配等等,这里具体理论和方法不做详解,只简单总结一个实例。图像匹配一般需要对旋转放缩进行处理,另外为了提高搜索效率,常用用图像金字塔来处理模板图像,图像金子塔就是把图像按一定算法,缩小为不同比例的模板,减少像素。一般的模板匹配流程如下:
所以首先创建模板,模板的创建就是采集一张自己需要的原始图像,如下我采集的原始图像:
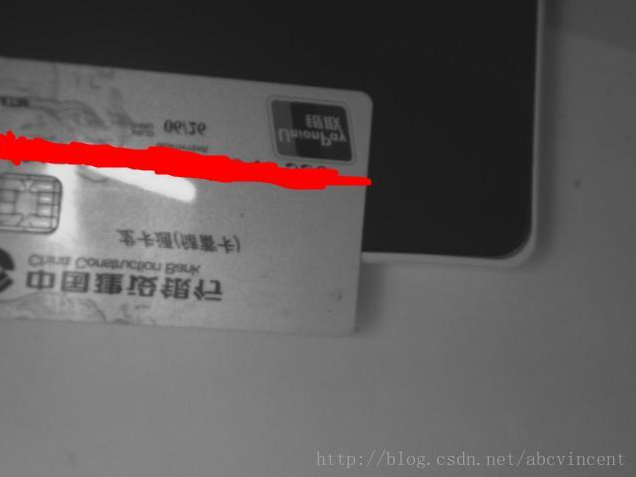
我需要的是银联那个标志,生成模板的源代码如下:
read_image (Image, 'E:/HalconTest/实验2d匹配/exp/110.jpg') *读取模板图像 rgb1_to_gray (Image, GrayImage) *灰度操作 gen_rectangle1 (ROI_0, 189.5, 531.5, 325.5, 717.5) *选择要匹配的图像,去除不必要的 reduce_domain (GrayImage, ROI_0, ImageReduced2) *减少图像,分割出切除的那部分 bin_threshold (ImageReduced2, Region1) *自动灰度阈值处理 connection (Region1, ConnectedRegions1) *求联通域 select_shape (ConnectedRegions1, SelectedRegions1, 'area', 'and', 8, 14016) *选择图像 reduce_domain (ImageReduced2, SelectedRegions1, ImageReduced3) *分割出图像 inspect_shape_model (ImageReduced3, ModelImages1, ModelRegions1, 4, 30) *创建一个形状的表示模型 create_scaled_shape_model (ImageReduced3, 'auto', rad(-45), rad(90), 'auto', 0.9, 1, 0, 'no_pregeneration', 'ignore_global_polarity', 'auto', 'auto', ModelID) *使用用图像创建带有缩放的匹配模板,上面的灰度分割什么的其实可以不要 *NumLevels 最高金子塔层数 *AngleStart 开始角度加rad(90)是将弧度制转为角度值 *AngleExtent 角度范围 *AngleStep 旋转角度步长 *ScaleMin 模板行方向缩放最小尺度 *ScaleMax 模板行方向缩放最大尺寸 *MinScore 最低匹配分值 百分比 *ScaleStep 步长 *Optimization 优化选项 是否减少模板点数 *Metric 匹配度量级性旋转 *MinContrast 最小对比度 *ModelID 生成模板ID write_shape_model (ModelID, 'C:/Users/shanwenjun/Desktop/img_model3.shm') *生成模板文件 --------------------- 作者:abcvincent 来源:CSDN 原文:https://blog.csdn.net/abcvincent/article/details/54808179 版权声明:本文为博主原创文章,转载请附上博文链接!
生成的模板文件要用来进行匹配,下面是我用摄像头进行实时匹配的图像:
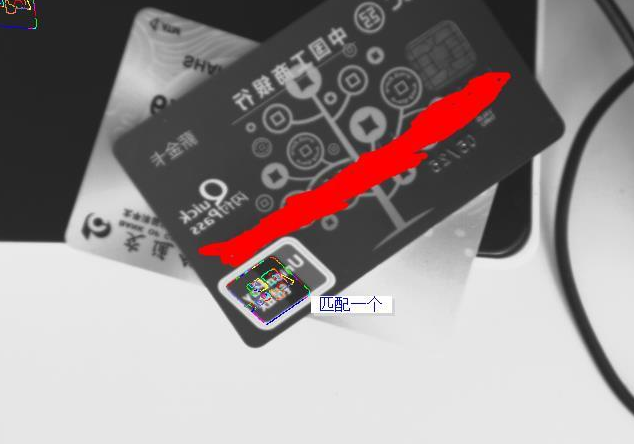
匹配的的源代码如下,左上角是图像处理过程叠加的:
dev_close_window ()
dev_open_window (0, 0, 640, 480, 'black', WindowHandle)
*先关闭活动图形窗口,再打开这个窗口,标识符为WindowHandle;
*相对于界面左上角第0行、第0列,大小是我相机的拍照比例,颜色为黑色。
open_framegrabber ('MindVision11', 1, 1, 0, 0, 0, 0, 'progressive', 8, 'Gray', -1, 'false', 'auto', 'Camera MV-U130RC#C17D8221-3', 0, -1, AcqHandle)
*DirectShow是笔记本摄像头或者其他DirectShow的摄像头,MindVision11是我相机的摄像头;
* 注意摄像头的名称,可以用工具栏中的“助手”——打开新的Image Acquisition获取摄像头及插入代码
grab_image_start (AcqHandle, -1)
while (true)
grab_image_async (Image, AcqHandle, -1)
* Calibration 01: Code generated by Calibration 01
CamParOriginal:= [0.01629,-2024.24,8.30436e-006,8.3e-006,710.402,361.975,1280,960]
CameraPose := [-0.0236413,0.0135896,0.152813,16.2821,3.05758,76.5791,0]
*上面是我相机的标定量,根据自己相机标定填写,此段代码不可直接用
CamParVirtualFixed:=CamParOriginal
CamParVirtualFixed[1]:=0
*上面是标定时候的参数设置
gen_radial_distortion_map(MapFixed,CamParOriginal,CamParVirtualFixed,'bilinear')
*生产径向畸变映射图,
*mapfixed是输出,
*CamParOriginal是标定后的参数,
*CamParVirtualFixed也是输出的参数,
*'bilinear'映射类型
map_image(Image,MapFixed,ImageRectifiedFixed)
*利用映射,消除图像畸变算子
read_shape_model ('E:/HalconTest/实验2d匹配/img_model/img_model3.shm', ModelID)
*读取图像
find_scaled_shape_model (ImageRectifiedFixed, ModelID, rad(-180), rad(180), 0.5, 1.2, 0.3, 1, 0.5, 'none', 4, 0.9, Row, Column, Angle, Scale, Score)
*寻找单个带尺度形状模板最佳匹配
*ImageRectifiedFixed 要搜索的图像
*ModelID 模板ID
*AngleStart 开始角度加rad(90)是将弧度制转为角度值
*AngleExtent 角度范围
*ScaleMin 模板行方向缩放最小尺度
*ScaleMax 模板行方向缩放最大尺寸
*MinScore 最低匹配分值 百分比
*NumMatches 匹配实例的个数
*MaxOverlap 最大重叠 在有重叠时也可检测匹配
*SubPixel 是否亚像素精度
*NumLevels 金子塔层数
*Greediness 搜索贪婪度; 0安全慢;1块不稳定;其他就是介于中间值
*剩下的几个参数是匹配图像的位置状态等参数
get_shape_model_contours (ModelContours, ModelID, 1)
*返回匹配结果的轮廓
for I := 0 to |Score| - 1 by 1
*for循环查找匹配
vector_angle_to_rigid (0, 0, 0, Row[I], Column[I], Angle[I], HomMat2DRotate)
*单匹配计算刚性变换矩阵 为了显示匹配图像
hom_mat2d_scale (HomMat2DRotate, Scale[I], Scale[I], Row[I], Column[I], HomMat2DScale)
*添加一个扩展到一个均匀的二维变换矩阵 为了显示匹配图像
affine_trans_contour_xld (ModelContours, ModelTrans, HomMat2DScale)
*应用任意二维仿射变换XLD轮廓 为了显示匹配图像
disp_message (WindowHandle,'匹配一个', 'image', Row[I], Column[I]+100, 'blue', 'true')
*添加文本
dev_display (ModelTrans)
*显示模型 为了显示匹配图像
endfor
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* ****
* step: destroy model
* ****
endwhile
clear_shape_model (ModelID)
---------------------
作者:abcvincent
来源:CSDN
原文:https://blog.csdn.net/abcvincent/article/details/54808179
版权声明:本文为博主原创文章,转载请附上博文链接!---------------------
作者:abcvincent
来源:CSDN
原文:https://blog.csdn.net/abcvincent/article/details/54808179
版权声明:本文为博主原创文章,转载请附上博文链接!
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





