 少有人走的路
少有人走的路接上一篇《Epson机器人标定后验证标定的精度(四)》
我们继续做实验,开始人工创建工具坐标。

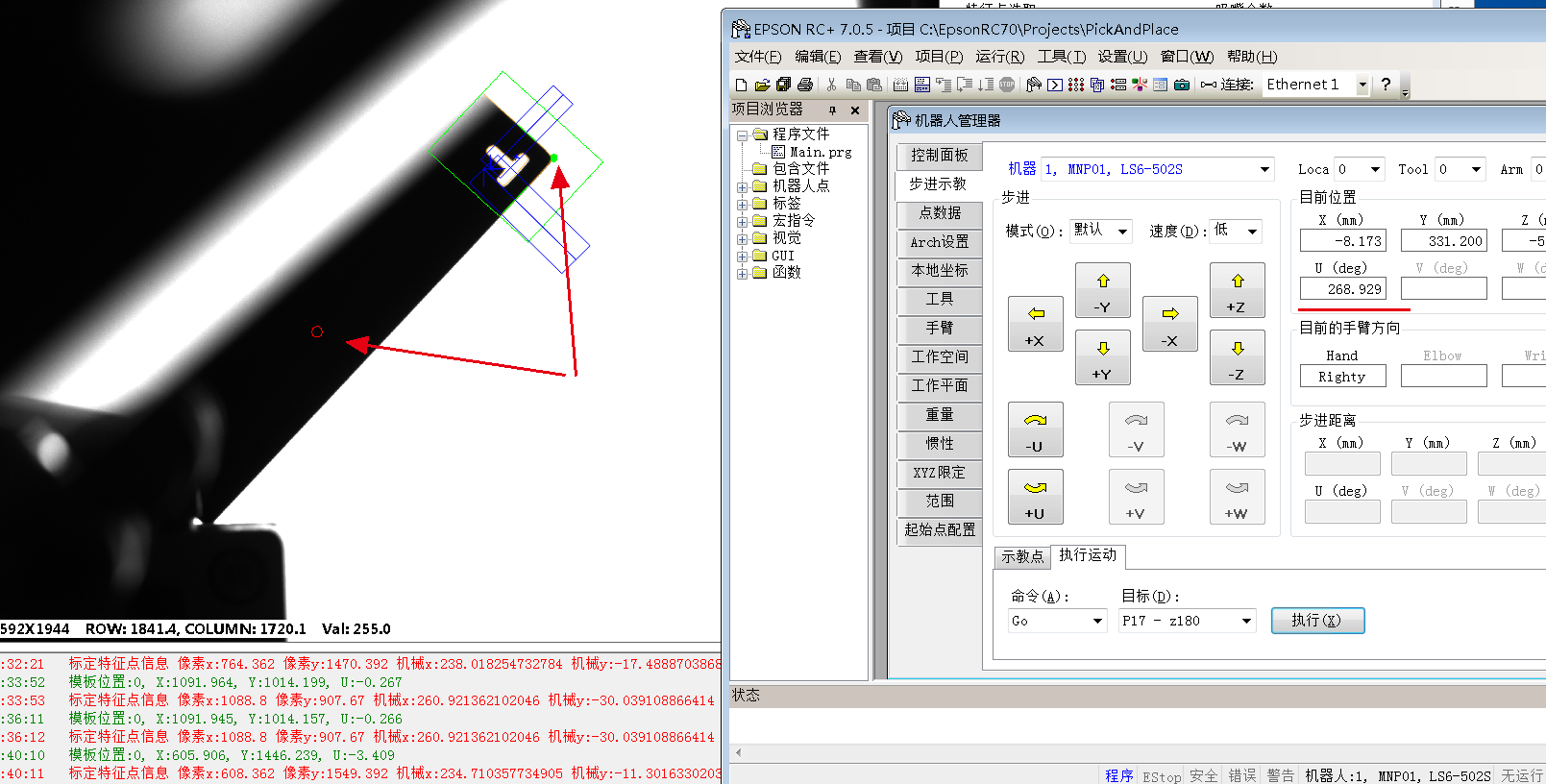
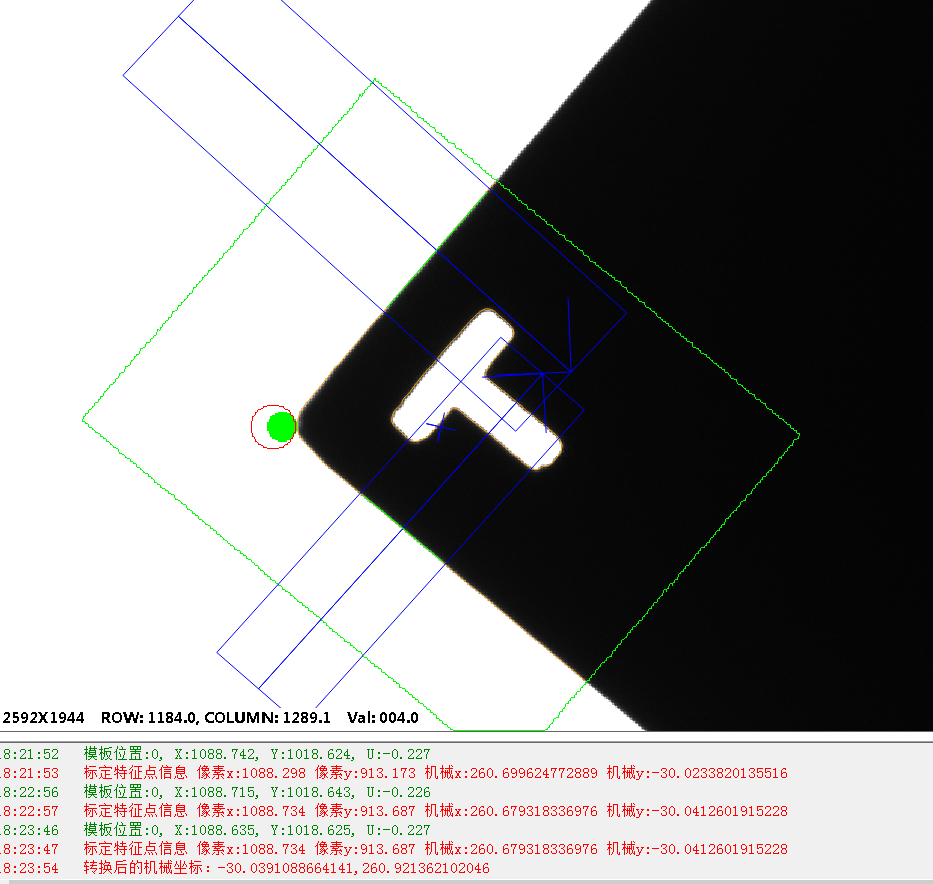
(图1 ct1点起始位置做为第一点)
注意看箭头处的红圈,它始终都指示着像素x:1088.8 y:907.67的位置。
等一会我们转180度后,就靠这个固定的红圈位置做指示。
创建一个转180度后的示教点,角度
88.929+180=268.929

(图2)
然后走到这个点位。
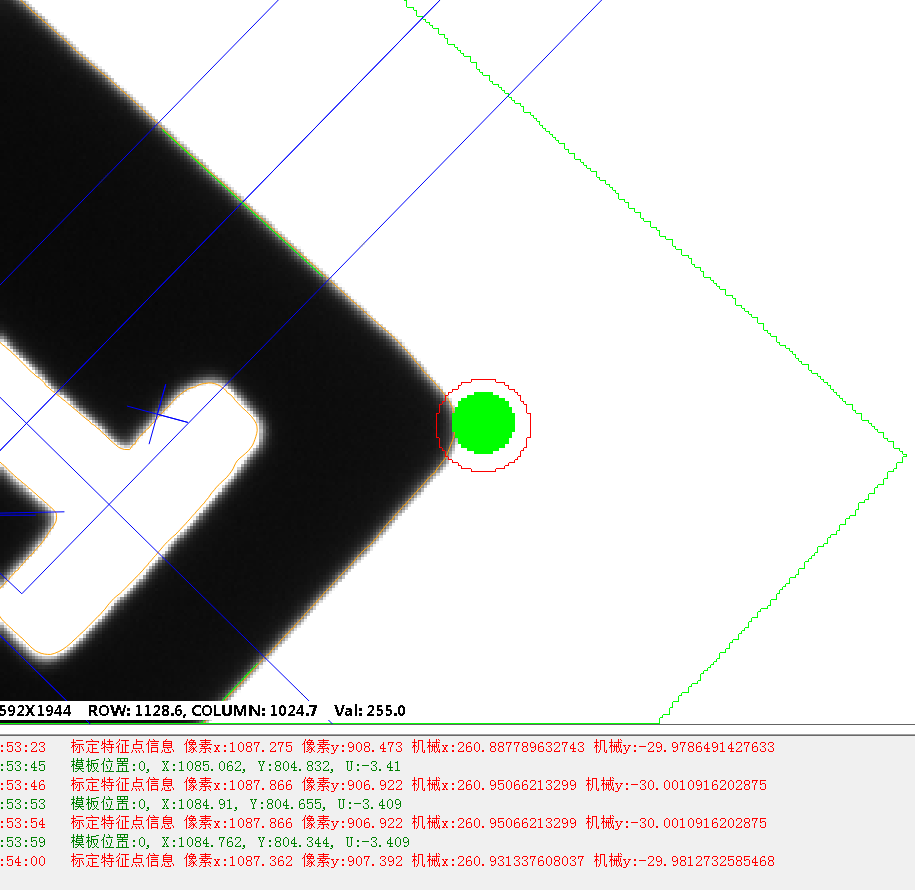
(图3)
走到z180点后,角度是正确的,转了180度。我们接下来要微调位置,让绿色的特征点刚好位于红圈内。
这个可以通过不断的拍照与微调来进行反复尝试。
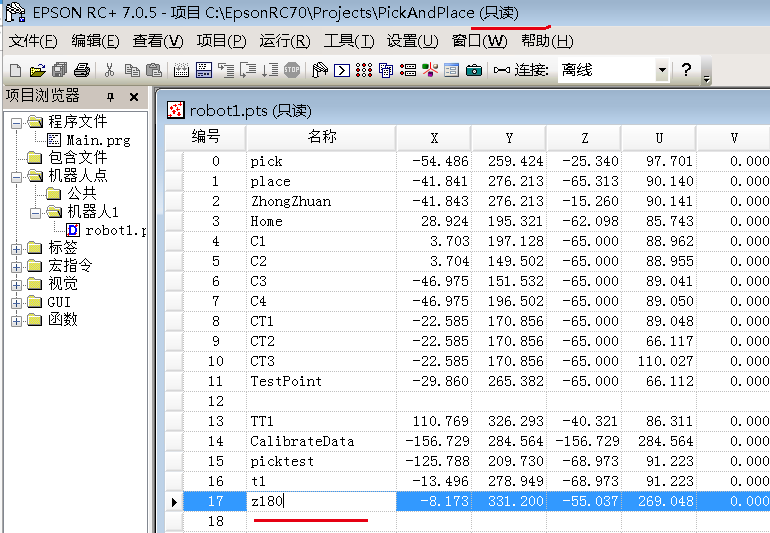
当绿点位于红圈中心位置后,我们就更新点z180的位置。
(图4)
勇哥好久才把绿点居红圈中心,貌似还有1,2个像素的误差的。
这个过程中,要适当改变机器人的步进距离,如下图。
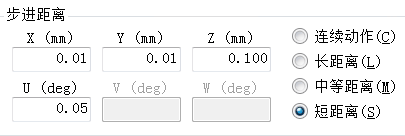
(图5)
有时候,你会发现角度正确后,只调x,y角度也会跟着变。
这个时候,可以尝试用命令输入,只修改x,y 角度就会卡住不动。
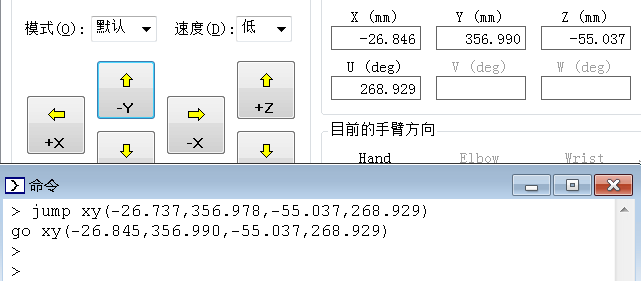
(图6 命令方式移动)
当然,也有通过计算,直接得到z180位置的办法,这样就不用人工这样去耗眼力去对齐了。
这个又是个秘密了。
更新好z180坐标后,你记住它的数值。
回到ct1点。
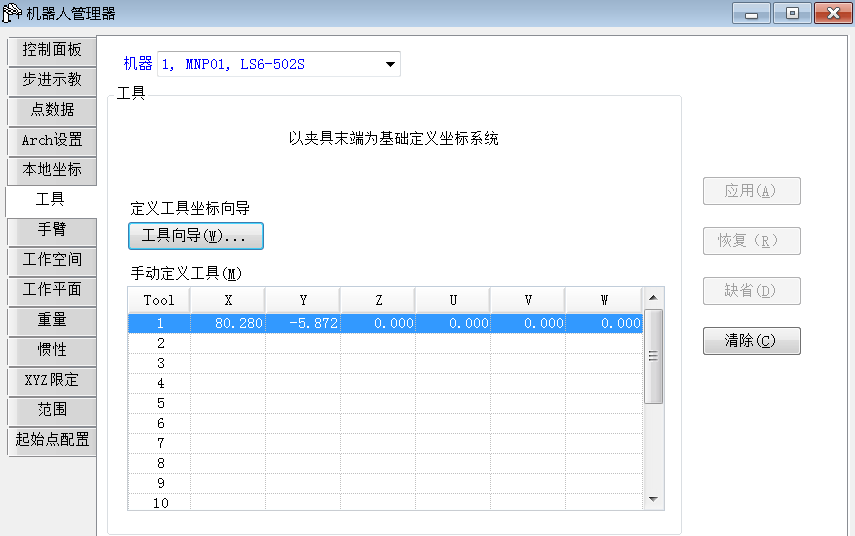
我们接下来用工具创建向导来创建工具 tool 1
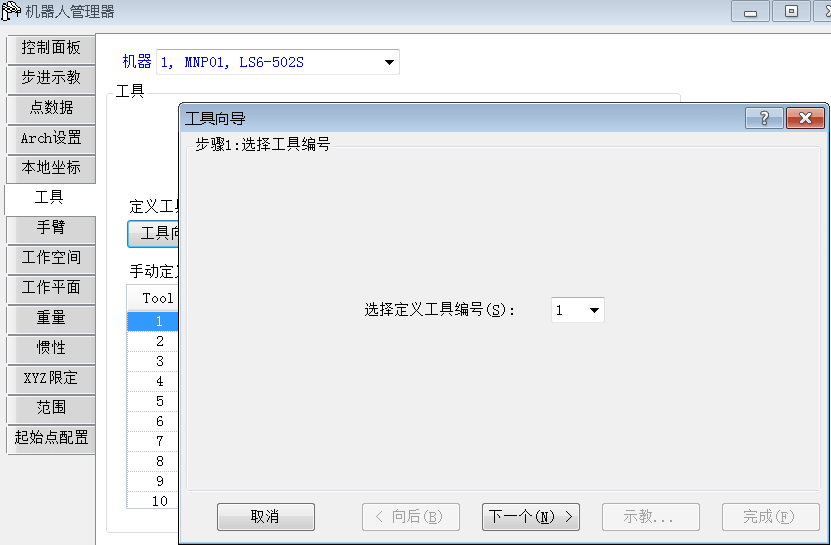
点示教。创建第一个示教点。
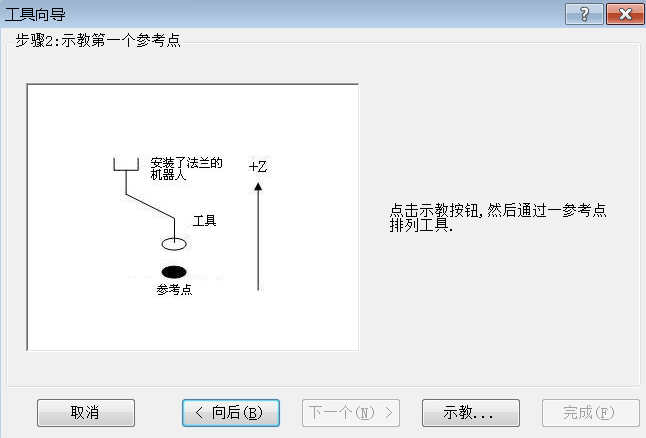
求教第一点,因为我们当前位置就是第一点,直接点“示教确认”就可以了。

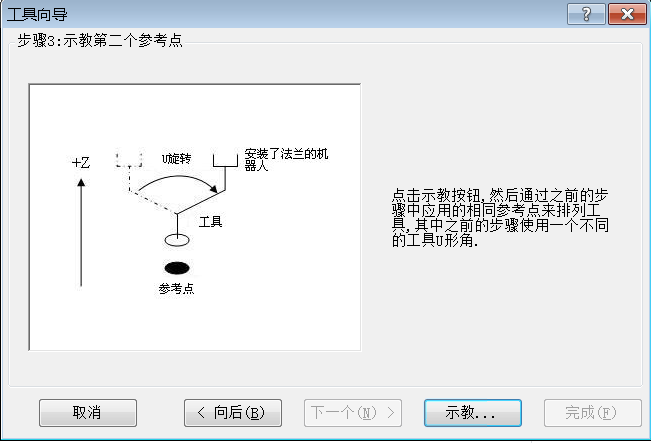
在示教点2时,你可以松开刹车,手动到大至的位置,接下来就可以微调了。

接下来参考图2来微调出x,y,u。

这时候如果你想看求教点z180的值,你可以再打开一个epson rc 7,打开当前的工程,就可以以只读方式查看点位了。
这个第二个点的示教确实是比较烦索的,大部分时间都耗在这里。
这里epson rc 7这个软件设计得也不方便,比如,这里不让直接走到我之前设定好的点位z180上去,或者如果能让我输入指令也好呀!
这些都不行,只能像傻瓜一样点那几个轴的微调按钮。
示教完成,我们覆盖了之前的tool 1。
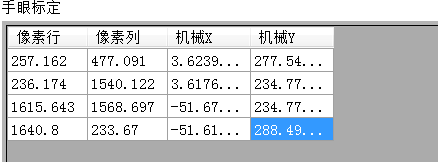
然后更新tool 1下面的c1,c2,c3,c4四组坐标,依次取得其像素与机构坐标。
c1: 17:36:42 标定特征点信息 像素x:257.162 像素y:477.091 机械x:277.541298959724 机械y:3.62397392686113 c2: 17:37:14 标定特征点信息 像素x:236.174 像素y:1540.122 机械x:234.771304872404 机械y:3.61761444217877 c3: 17:37:36 标定特征点信息 像素x:1615.643 像素y:1568.697 机械x:234.777993960049 机械y:-51.6741302613036 c4: 17:38:01 标定特征点信息 像素x:1640.8 像素y:233.67 机械x:288.490469851755 机械y:-51.6180184291419
把结果填表,然后进行标定。
回到点c1。
标定特征点信息 像素x:257.162 像素y:477.091 机械x:277.541298959724 机械y:3.62397392686112
我们按上篇的实验来测试一下,指定一个像素点转为机械点门机器人走过去试试,看准不准。
结果:
x偏差: -0.01
y偏差: -0.24
上一篇我们使用自动标定后的测试结果是:
x相差:0.3mm
y相差: 0.22mm
可以看到结果是要好一些了。
然而,y结果还是不怎么样。勇哥又不知道怎么解释了。
既然如此,我们继续做取放重复性的测试吧, 看结果有否改善。
注:
许多人可能会问,做工具坐标时第二个点如果转不到180怎么办?
按照经验,如果真没法转个180度的话,转个60度,90度问题也不是非常大。
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!




")
")
常用的6种方法")
 封装运动功能")
")
:运行时api的使用,vs环境下的联调")




Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





