 少有人走的路
少有人走的路上一个博文说了一种手眼标定系统的特殊情况,就是相机随着机械手一起移动的情况。虽然前面简单介绍了一种办法,就是每次拍照时让相机回到之前标定的位置,但是这样处理机器人的工作效率就会大大降低,产生很多重复动作,所以这篇博文就来讲一种更简单的标定方案。
下面是halcon官方给的手眼标定系统的案例代码。
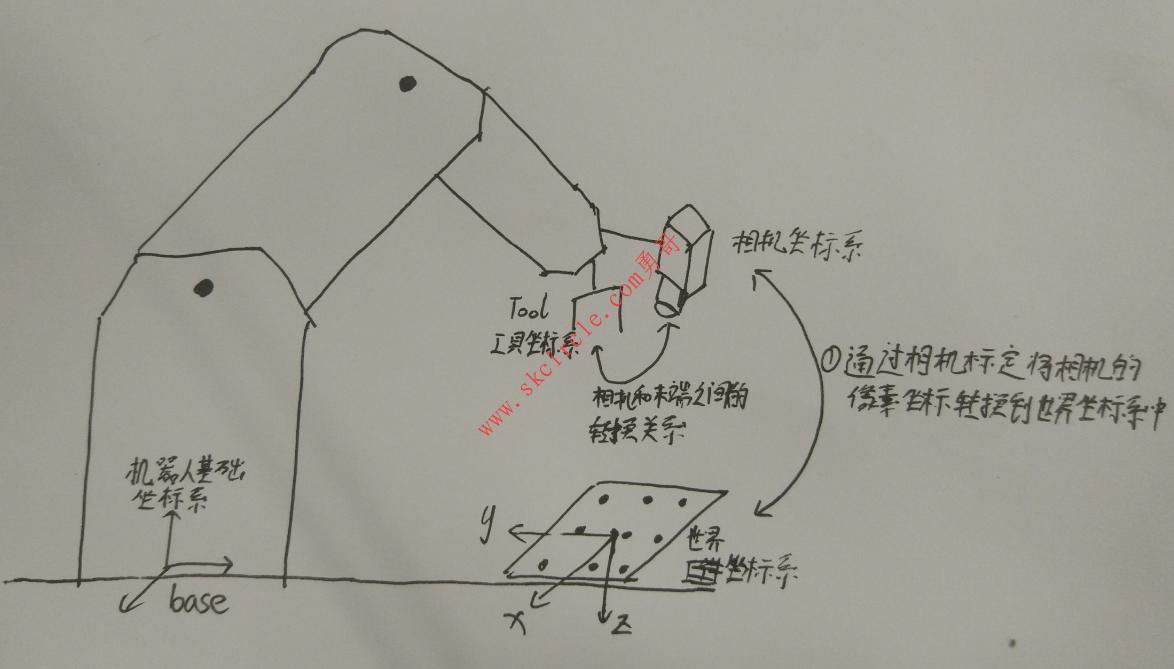
这个例子主要应用于相机固定在机械手末端的手眼系统中,而且标定板相对于机器人也是静止的。
在这种情况下,手眼校准的目标是确定两个未知姿势:
校准对象(CalObjInBasePose)的坐标系中机器人基座的姿态。
相机在工具中心点坐标系中的姿态。
理论上,作为输入,该方法在摄像机坐标系中至少需要3个校准对象的姿势。但是我们在实际工程应用中需要至少10个姿态。
校准对象的姿态是从连接到机器人的摄像头记录的校准对象的图像中获得的。为了获得更好的结果,将摄像机相对于校准对象放置以使对象在图像中倾斜是至关重要的。
在手眼校准之后,提取计算出的变换并用于计算摄像机坐标系中校准对象的姿态。
dev_update_off ()
* Directories with calibration images and data files
ImageNameStart := '3d_machine_vision/handeye/movingcam_calib3cm_'
DataNameStart := 'handeye/movingcam_'
NumImages := 14
read_image (Image, ImageNameStart + '00')
dev_close_window ()
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_set_line_width (2)
dev_set_draw ('margin')
dev_display (Image)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
* Load the calibration plate description file.
* Make sure that the file is in the current directory or
* in HALCONROOT/calib, or use an absolute path.
CalTabFile := 'caltab_30mm.descr'
* Read the initial values for the internal camera parameters
read_cam_par (DataNameStart + 'start_campar.dat', StartCamParam)
* Create the calibration model for the hand eye calibration
* where the calibration object is observed with a camera
create_calib_data ('hand_eye_moving_cam', 1, 1, CalibDataID)
* Set the camera type used
set_calib_data_cam_param (CalibDataID, 0, 'area_scan_division', StartCamParam)
* Set the calibration object
set_calib_data_calib_object (CalibDataID, 0, CalTabFile)
* Start the loop over the calibration images
* Set the opitmization method to be used
set_calib_data (CalibDataID, 'model', 'general', 'optimization_method', 'nonlinear')
disp_message (WindowHandle, 'The calibration data model was created', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
for I := 0 to NumImages - 1 by 1
read_image (Image, ImageNameStart + I$'02d')
* Search for the calibration plate, extract the marks and the
* pose of it, and store the results in the calibration data
* The poses are stored in the calibration data model for use by
* the hand eye calibration and do not have to be set explicitly
find_calib_object (Image, CalibDataID, 0, 0, I, [], [])
get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, I)
get_calib_data_observ_points (CalibDataID, 0, 0, I, RCoord, CCoord, Index, PoseForCalibrationPlate)
* Visualize the extracted calibration marks and the estimated pose (coordinate system)
dev_set_color ('green')
dev_display (Image)
dev_display (Caltab)
dev_set_color ('yellow')
disp_cross (WindowHandle, RCoord, CCoord, 6, 0)
dev_set_colored (3)
disp_3d_coord_system (WindowHandle, StartCamParam, PoseForCalibrationPlate, 0.01)
* Read pose of tool in robot base coordinates (ToolInBasePose)
read_pose (DataNameStart + 'robot_pose_' + I$'02d' + '.dat', ToolInBasePose)
* Set the pose tool in robot base coordinates in the calibration data model
set_calib_data (CalibDataID, 'tool', I, 'tool_in_base_pose', ToolInBasePose)
* Uncomment for inspection of visualization
* disp_message (WindowHandle, 'Extracting data from calibration image ' + (I + 1) + ' of ' + NumImages, 'window', 12, 12, 'black', 'true')
* disp_continue_message (WindowHandle, 'black', 'true')
* stop ()
endfor
disp_message (WindowHandle, 'All relevant data has been set in the calibration data model', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* Perform the hand eye calibration and store the results to file
* The calibration of the cameras is done internally prior
* to the hand eye calibration
dev_display (Image)
disp_message (WindowHandle, 'Performing the hand-eye calibration', 'window', 12, 12, 'black', 'true')
calibrate_hand_eye (CalibDataID, PoseErrors)
* Query the camera parameters and the poses
get_calib_data (CalibDataID, 'camera', 0, 'params', CamParam)
* Get poses computed by the hand eye calibration
get_calib_data (CalibDataID, 'camera', 0, 'tool_in_cam_pose', ToolInCamPose)
get_calib_data (CalibDataID, 'calib_obj', 0, 'obj_in_base_pose', CalObjInBasePose)
dev_get_preferences ('suppress_handled_exceptions_dlg', PreferenceValue)
dev_set_preferences ('suppress_handled_exceptions_dlg', 'true')
try
* Handle situation where user does not have the permission
* to write in the current directory.
*
* Store the camera parameters to file
write_cam_par (CamParam, DataNameStart + 'final_campar.dat')
* Save the hand eye calibration results to file
write_pose (ToolInCamPose, DataNameStart + 'final_pose_cam_tool.dat')
write_pose (CalObjInBasePose, DataNameStart + 'final_pose_base_calplate.dat')
catch (Exception)
* do nothing
endtry
dev_set_preferences ('suppress_handled_exceptions_dlg', PreferenceValue)
dev_display (Image)
* Display calibration errors
Message := 'Quality of the results: root mean square maximum'
Message[1] := 'Translation part in meter: ' + PoseErrors[0]$'6.4f' + ' ' + PoseErrors[2]$'6.4f'
Message[2] := 'Rotation part in degree: ' + PoseErrors[1]$'6.4f' + ' ' + PoseErrors[3]$'6.4f'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* For the given camera, get the corresponding pose indices and calibration object indices
query_calib_data_observ_indices (CalibDataID, 'camera', 0, CalibObjIdx, PoseIds)
* Compute the pose of the calibration object in the camera coordinate
* system via calibrated poses and the ToolInBasePose and visualize it.
for I := 0 to NumImages - 1 by 1
read_image (Image, ImageNameStart + I$'02d')
dev_display (Image)
* Obtain the pose of the tool in robot base coordinates used in the calibration.
* The index corresponds to the index of the pose of the observation object.
get_calib_data (CalibDataID, 'tool', PoseIds[I], 'tool_in_base_pose', ToolInBasePose)
* Compute the pose of the calibration object relative to the camera
calc_calplate_pose_movingcam (CalObjInBasePose, ToolInCamPose, ToolInBasePose, CalObjInCamPose)
* Display the coordinate system
dev_set_colored (3)
disp_3d_coord_system (WindowHandle, CamParam, CalObjInCamPose, 0.01)
Message := 'Using the calibration results to display '
Message[1] := 'the coordinate system in image ' + (I + 1) + ' of ' + NumImages
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
if (I < NumImages - 1)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
* Clear the data model
clear_calib_data (CalibDataID)
*
* After the hand-eye calibration the computed pose
* ToolInCamPose can be used in robotic grasping applications.
* If the tool coordinate system is placed at the gripper
* and a detected object ObjInCamPose shall be grasped
* (here the calibration object),
* the pose of the detected object relative
* to the robot base coordinate system has to be computed.
pose_invert (ToolInCamPose, CamInToolPose)
pose_compose (ToolInBasePose, CamInToolPose, CamInBasePose)
pose_compose (CamInBasePose, CalObjInCamPose, ObjInBasePose)————————————————
版权声明:本文为CSDN博主「南山二毛」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_16481211/java/article/details/79767100
本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群:



")
")
常用的6种方法")
 封装运动功能")







Qt Widgets Designer界面设计器和界面应用")
:if的bool判断, 变量的作用域范围, 格式字符串, 弹窗, 列表推导式, 一个点歌小程序")





