MVVM演示
TodoItem.cs
namespace _07_MVVM.Models;
public class TodoItem
{
public required string Title { get; set; }
public bool IsCompleted { get; set; }
public string Priority { get; set; } = "Normal";
}MVVM演示
TodoItem.cs
namespace _07_MVVM.Models;
public class TodoItem
{
public required string Title { get; set; }
public bool IsCompleted { get; set; }
public string Priority { get; set; } = "Normal";
}数据绑定
App.axaml
注意如果没有写<FluentTheme/>,则这些Fluent控件将没有效果,比如滑块控件成了一个Lable控件,只显示文字了。
ListBox演示
MainWindow.axaml
MainWindow.axaml
<Window xmlns="https://github.com/avaloniaui" xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml" x:Class="_04_TextInput.MainWindow" Title="Text Input - 文本输入演示" Width="450" Height="400"> <StackPanel Margin="30" Spacing="20"> <TextBlock Text="TextBox(文本框)" FontSize="16" FontWeight="Bold"/> <StackPanel Spacing="5"> <TextBlock Text="请输入您的名字:"/> <TextBox x:Name="NameTextBox" Watermark="在这里输入..." MaxLength="50"/> </StackPanel> <StackPanel Spacing="5"> <TextBlock Text="多行文本框:"/> <TextBox x:Name="MultiLineTextBox" AcceptsReturn="True" AcceptsTab="True" TextWrapping="Wrap" Height="80" Watermark="支持多行输入..."/> </StackPanel> <Button x:Name="SubmitButton" Content="提交" HorizontalAlignment="Center" Padding="30,10"/> <TextBlock x:Name="ResultText" Text="" FontSize="14" Foreground="#2196F3" TextWrapping="Wrap"/> </StackPanel> </Window>
常用布局面板演示
MainWindow.axaml
<Window xmlns="https://github.com/avaloniaui" xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml" x:Class="_03_LayoutPanel.MainWindow" Title="Layout Panel - 布局面板演示" Width="600" Height="500"> <ScrollViewer> <StackPanel Spacing="20" Margin="20"> <TextBlock Text="StackPanel(栈面板)" FontSize="16" FontWeight="Bold"/> <Border Background="#E3F2FD" Padding="10" CornerRadius="5"> <StackPanel Spacing="10"> <Button Content="按钮 1"/> <Button Content="按钮 2"/> <Button Content="按钮 3"/> </StackPanel> </Border> <TextBlock Text="WrapPanel(环绕面板)" FontSize="16" FontWeight="Bold"/> <Border Background="#E8F5E9" Padding="10" CornerRadius="5"> <WrapPanel> <Button Content="按钮 A" Margin="5"/> <Button Content="按钮 B" Margin="5"/> <Button Content="按钮 C" Margin="5"/> <Button Content="按钮 D" Margin="5"/> <Button Content="按钮 E" Margin="5"/> <Button Content="按钮 F" Margin="5"/> </WrapPanel> </Border> <TextBlock Text="StackPanel Horizontal(水平栈面板)" FontSize="16" FontWeight="Bold"/> <Border Background="#FFF3E0" Padding="10" CornerRadius="5"> <StackPanel Orientation="Horizontal" Spacing="10"> <Button Content="左"/> <Button Content="中"/> <Button Content="右"/> </StackPanel> </Border> <TextBlock Text="DockPanel(停靠面板)" FontSize="16" FontWeight="Bold"/> <Border Background="#F3E5F5" Padding="10" CornerRadius="5" Height="120"> <DockPanel> <Border DockPanel.Dock="Top" Background="#9C27B0" Height="30" CornerRadius="3" Margin="0,0,0,5"> <TextBlock Text="顶部区域" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> <Border DockPanel.Dock="Bottom" Background="#FF5722" Height="30" CornerRadius="3" Margin="0,5,0,0"> <TextBlock Text="底部区域" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> <Border DockPanel.Dock="Left" Background="#2196F3" Width="80" CornerRadius="3" Margin="0,5,5,5"> <TextBlock Text="左侧" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> <Border Background="#4CAF50" CornerRadius="3" Margin="0,5,0,5"> <TextBlock Text="中间区域(自动填充)" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> </DockPanel> </Border> <TextBlock Text="Grid(网格布局)" FontSize="16" FontWeight="Bold"/> <Border Background="#ECEFF1" Padding="10" CornerRadius="5" Height="150"> <Grid> <Grid.RowDefinitions> <RowDefinition Height="*"/> <RowDefinition Height="*"/> </Grid.RowDefinitions> <Grid.ColumnDefinitions> <ColumnDefinition Width="*"/> <ColumnDefinition Width="*"/> </Grid.ColumnDefinitions> <Border Grid.Row="0" Grid.Column="0" Background="#F44336" Margin="2" CornerRadius="3"> <TextBlock Text="(0,0)" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> <Border Grid.Row="0" Grid.Column="1" Background="#4CAF50" Margin="2" CornerRadius="3"> <TextBlock Text="(1,0)" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> <Border Grid.Row="1" Grid.Column="0" Background="#2196F3" Margin="2" CornerRadius="3"> <TextBlock Text="(0,1)" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> <Border Grid.Row="1" Grid.Column="1" Background="#FF9800" Margin="2" CornerRadius="3"> <TextBlock Text="(1,1)" HorizontalAlignment="Center" VerticalAlignment="Center" Foreground="White"/> </Border> </Grid> </Border> </StackPanel> </ScrollViewer> </Window>
按钮与事件
解决方案:
MainWindow.axaml
vs2022配置Avalonia环境
(1)安装vs2022
(2)安装插件
安装Avalonia for Visual Studio扩展
(3)项目模板
Autofac这样的依赖注入框架还可以继续在Avalonia中使用吗?
可以。 Autofac 完全可以在 Avalonia 中使用。
Avalonia 本身不内置依赖注入,但它基于 .NET,你完全可以像在普通 WPF 或控制台应用中一样使用
wpf的基础知识点演示:
知识点包括下面这些:
(1)常见的知识点
cs中的:
这一节演示一下wpf, CommunityToolkit.Mvvm, Autofac 技术栈下的多页面操作。
解决方案:
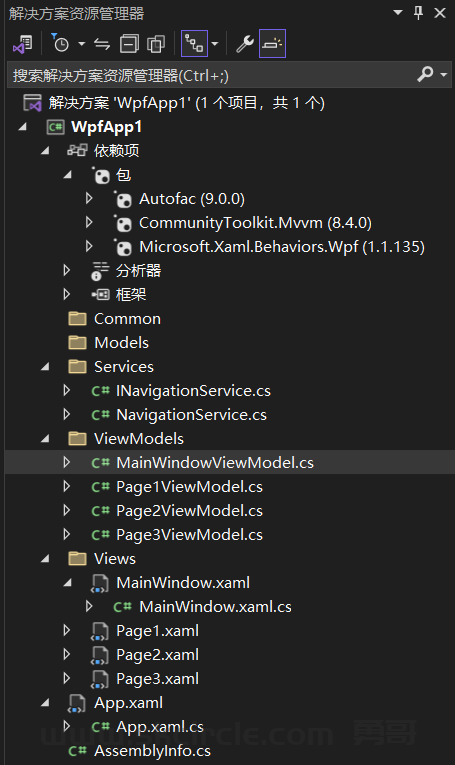
INavigationService.cs
Powered By Z-BlogPHP 1.7.3
Copyright www.skcircle.com Rights Reserved.